1. 用pix玩车非常简单,复杂度远远低于无人机;


2. 不管是ardupilot,还是px4固件都是原生支持无人车,不需要做任何代码改动的二次开发,需要做的就是参数修改和传感器校准;

3. ardupilot需要刷成ardurover固件,这个固件同时也支持船。
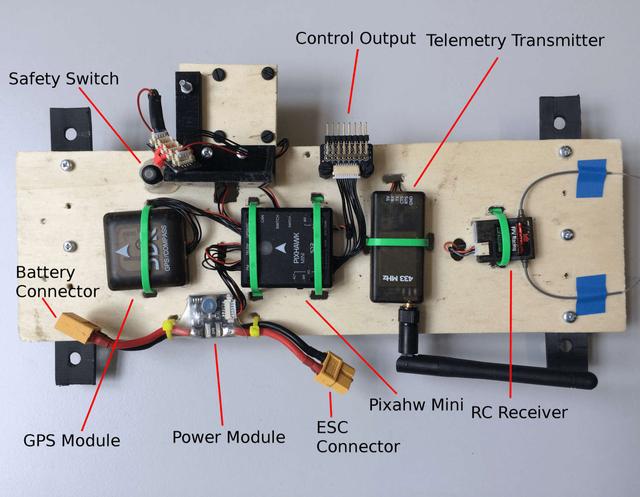
a. 输出1通道接舵机是车辆转向
b. 输出3通道接电调,控制油门动力

4. px4固件没有特定的固件,只需要改改机架到对应的车辆即可(SYS_AUTOSTART = 50000)
a. 输出2通道接转向舵机
b. 输出4通道接无刷电调

5. 陀螺仪,罗盘校准,这些和无人没有差别。
6. 解锁电机,默认手动模式,可以设置多个模式 比如返航,自动等;

给飞控用串口接上带摄像头的树莓派,这样一个智能车就跑起来了,还带图传和数传, 如果再给树莓派接一个带sim卡的usb无线网卡 ,这样一个带4G的智能小车了。
参考文档:
https://docs.px4.io/main/en/frames_rover/traxxas_stampede.html
https://ardupilot.org/rover/docs/gettit.html
〖特别声明〗:本文内容仅供参考,不做权威认证,如若验证其真实性,请咨询相关权威专业人士。如有侵犯您的原创版权或者图片、等版权权利请告知 wzz#tom.com,我们将尽快删除相关内容。
 微信扫一扫
微信扫一扫